Conoce a nuestro equipo en San Diego, Estados Unidos, desde el martes 23 hasta el jueves 25 de abril en XPONENTIAL, stand 4700
Actualización técnica: Pero… ¿qué es? RTK ¿GNSS?
2018-06-19
Sistemas de Navegación Global (GNSS) para uso civil, como GPS, GLONASS, Galileo or Beidou, puede alcanzar en excelentes condiciones una precisión absoluta de entre 1 y 3 metros en unos pocos segundos.
Esta precisión se puede reducir a unos pocos decímetros, sólo en condiciones estáticas y después de un largo survey tiempo (24 horas).
Pero, por supuesto, queremos tener una buena precisión al mover aplicaciones 🙂
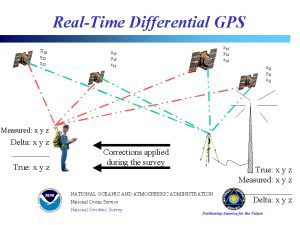
Cinemática en tiempo real (RTK) posicionamiento, es una técnica utilizada para solucionar esta limitación.
Al realizar mediciones de la misma señal de satélites, desde 2 unidades cercanas, podemos extraer los errores comunes y lograr una precisión relativa muy alta, que puede alcanzar los 5 centímetros.
Si además conocemos la posición absoluta de una unidad (también llamada “Base”), también tendremos la posición de la “Rover”con alta precisión absoluta.
u-blox hizo un excelente video de 2 minutos que lo explica de una manera más visual:
1. Nuestro equipo de ingeniería se pondrá en contacto contigo para resolver cualquier duda
2. Lo mantendremos informado sobre promociones y lanzamientos de nuevos productos.
3. Solo sabrá de nosotros cuando tengamos noticias importantes, no enviaremos spam a su correo electrónico.
 y
y  Comprar ahora
Comprar ahora