y
y 
Introducción:
El módulo ZED-F9R combina diferentes datos de sensores to provide high accurate positioning where GNSS alone would fail:
- Mediciones GNSS
- IMU datos (acelerómetro+giroscopio)
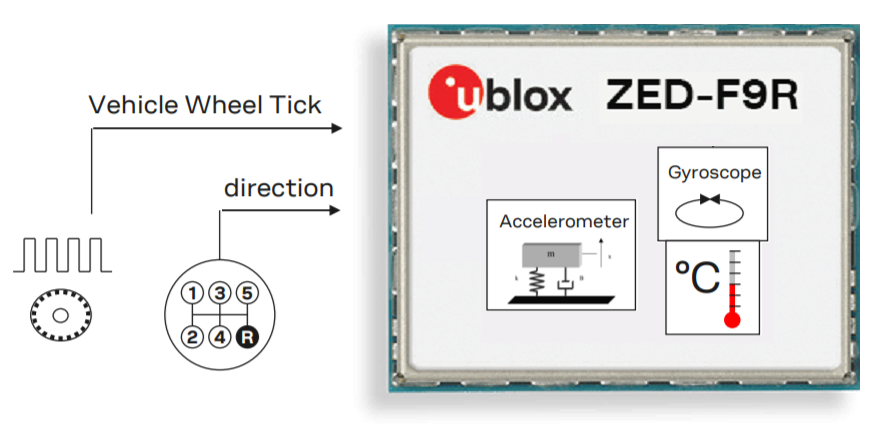
- (Opcional) sensor de rueda del vehículo o información de velocidad por software
- Un modelo dinámico dedicado
Pero lo sorprendente del F9R es que es capaz de mantener la precisión centimétrica donde ZED-F9P no puede: ¡conducir bajo árboles, junto a edificios altos o incluso en túneles!
Veamos cómo podemos probar esto con simpleRTK2B Fusion.

Tipos de arreglos y modos de uso:
Además del tradicional 2D, 3D, FLOAT RTK, ARREGLAR RTK, el ZED-F9R tiene 2 tipos de arreglos adicionales:
- DR+GNSS o “modo fusión”. El modo en el que queremos estar: tanto GNSS como IMU se utilizan juntos.
- DR o “Modo de navegación a estima”. El módulo tiene lost señales GNSS y se basa únicamente en la IMU. Cada segundo adicional en este tipo de solución, la posición empeorará cada vez más.
ZED-F9R tiene muchos parámetros de configuración nuevos que pueden hacer que la configuración sea abrumadora. Por esta razón, en esta guía de conexión vamos a explicar 2 tipos de instalación diferentes y 2 diferentes modos de uso:
- Modo básico: no alcanzarás los valores de la hoja de datos, pero con minimuCon mi esfuerzo podrás ver un rendimiento ya increíble. Sólo necesitas esta guía de conexión.
- Modo avanzado: vea los valores de la hoja de datos en sus pruebas. Deberá leer algunas páginas del Manual de integración de u-blox. Usaremos los pines de "rueda tick" y "dirección" del módulo.
Instalación:
simpleRTK2B Fusion Debe fijarse al vehículo, no se puede utilizar colgado del cable. Esto se debe a que necesitamos la IMU los datos sean consistentes.
Hay opciones para montar ZED-F9R en diferentes orientaciones, pero esto requiere una calibración adicional. Por este motivo, recomendamos montar el ZED-F9R en la dirección predeterminada.
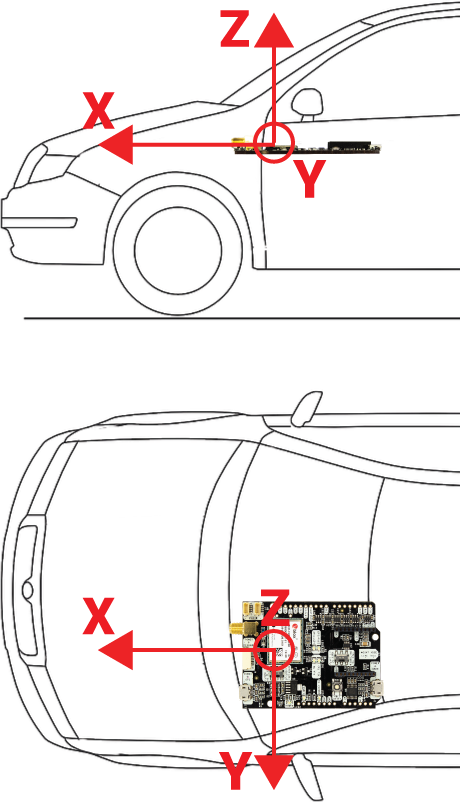
Si desea montar ZED-F9R en una orientación diferente, también es posible, pero es más complejo. Puedes echar un vistazo a las secciones. IMU-montaje de alineación y automático IMU-Alineación de montaje en el Manual de integración.
Para sacarle el máximo partido a F9R, lo más sencillo es colocar el RTK placa y la antena GNSS lo más cerca posible entre sí.
Modo de uso básico:
El uso básico de F9R es únicamente fusionar datos GNSS y IMU datos, pero no utiliza información de velocidad del vehículo. Este modo no requiere usar los pines WT o DIR, tampoco requiere enviar velocidad al F9R. El rendimiento será ligeramente peor que el de la hoja de datos del F9R, pero lo suficientemente bueno para muchos casos de uso.
Asegúrese de que tanto la antena GNSS como simpleRTK2B2B se fijan al coche y encienden el receptor.
Seleccione el "Modelo dinámico" correcto en CFG-NAVSPG-DYNMODEL:
- Automotriz
- Cortacésped robótico
- E-Scooter
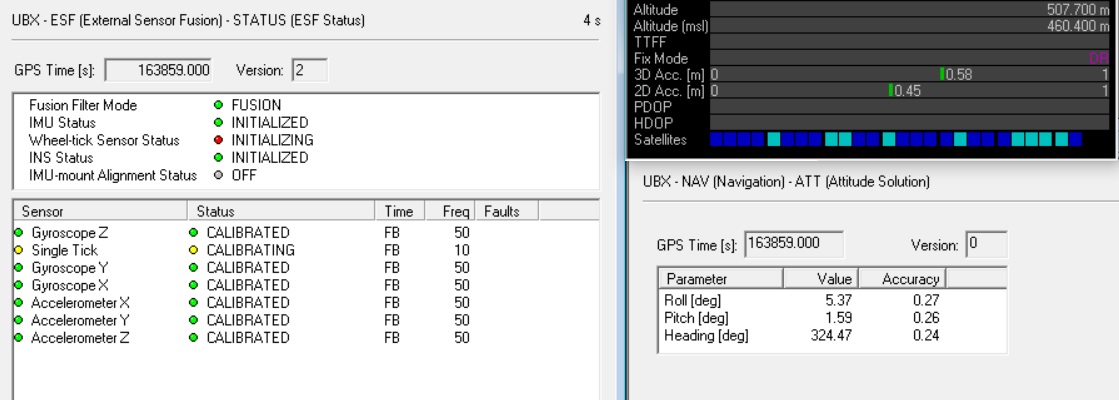
Habilite los siguientes mensajes que proporcionarán información útil sobre:
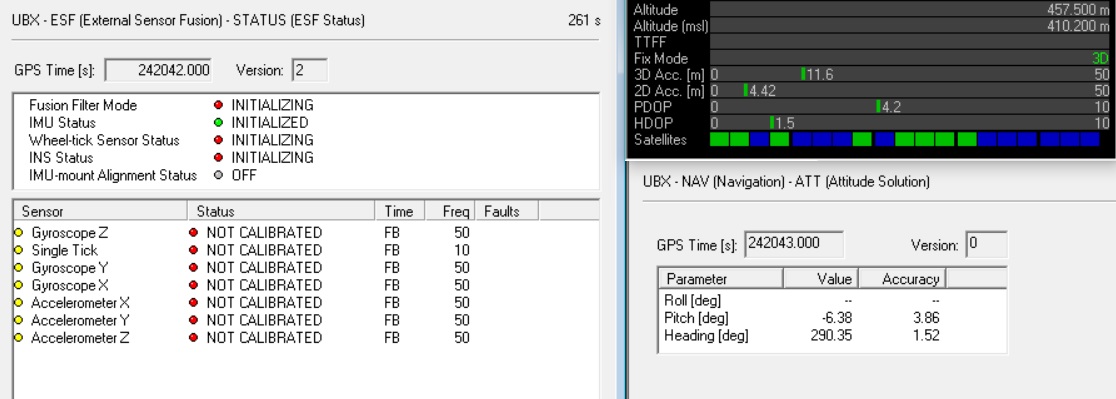
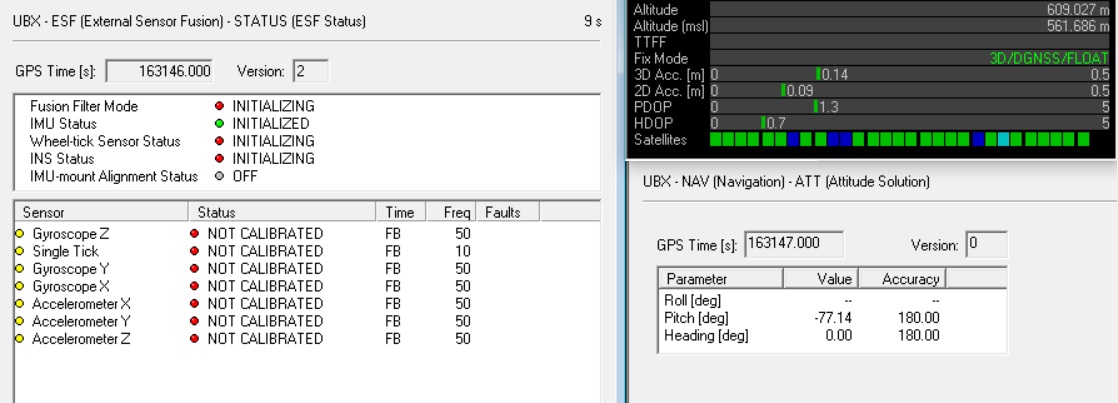
- ESTADO UBX-ESF: IMU estado de calibración, queremos que todo esté en verde.
- UBX-NAV-ATT: la actitud del vehículo: balanceo, cabeceo, guiñada.
- UBX-NAV-PVT: tipo fijo y posición.
Al principio se comportará como algo normal. ZED-F9P con una solución 3D:
Si ingresa RTK correcciones, obtendrá también un RTK FLOAT arreglado y finalmente RTK FIXModo DE.
¡Después de unos minutos de conducción, los sensores se calibrarán y finalmente verá el nuevo modo de fusión (3D + DR)!
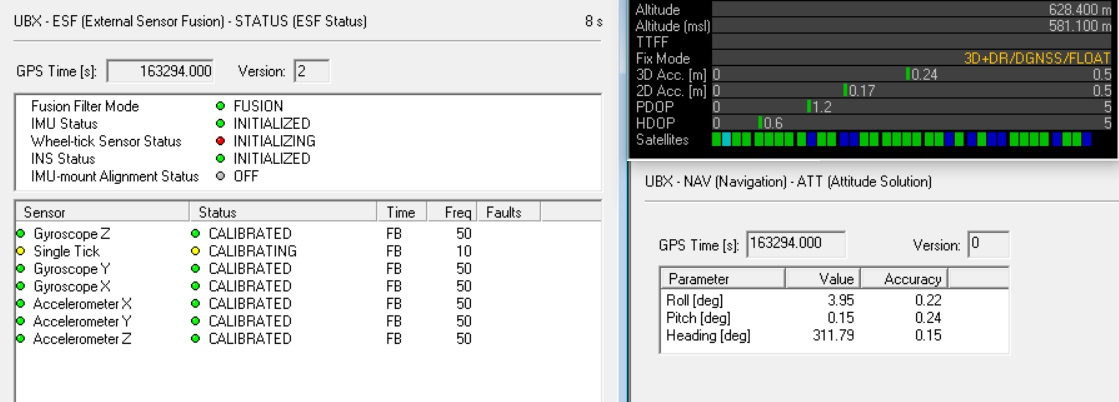
Una vez que estamos en el modo de fusión, esto también nos permite un nuevo caso de uso: podemos ingresar a túneles y garajes cortos y mantener una posición precisa. Pruébelo y compruebe cómo F9R pasa al tipo de corrección "DR". Tenga en cuenta que la precisión en el modo "DR" empeorará cada segundo.