 y
y 

Como resultado, se muestran los datos recibidos en el servidor:
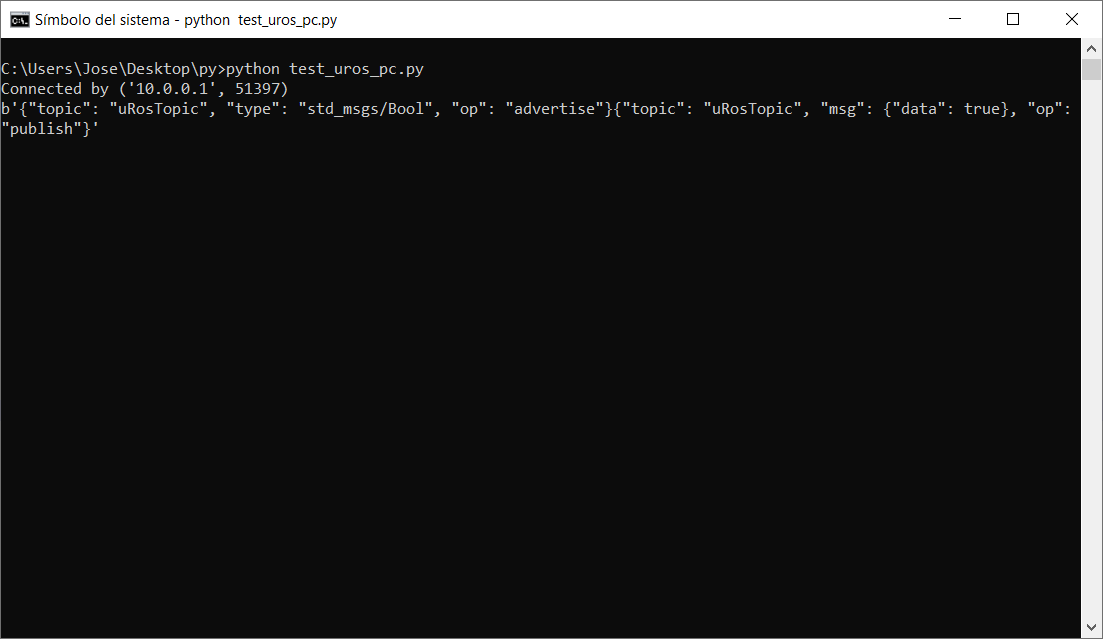
Si examinamos los datos vemos dos partes:
1. La definición de nuestro mensaje uRosTopic. Este solo se envía una vez por cada nuevo tipo de mensaje.

2. Y los datos publicados. Esto se envía cada vez que publicamos un nuevo valor.

Ahora está listo para conectar su SBC a cualquier dispositivo ROS a través de Ethernet, definir un mensaje personalizado y enviarlo con solo unas pocas líneas de código Python.
