Cómo conectarse a la estación base y ver el Rover¿La posición en tiempo real?
En primer lugar, configure su Rover.
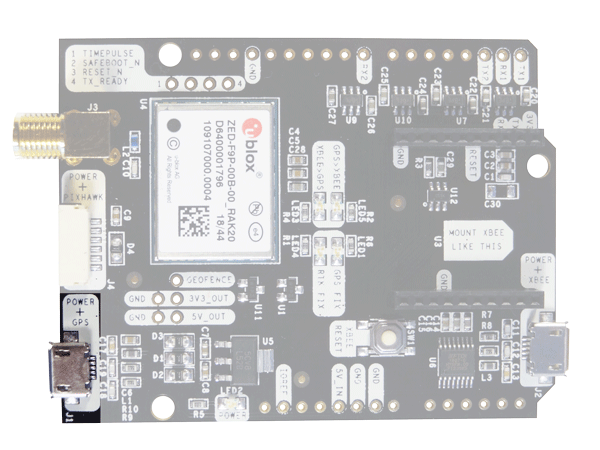
conectar su Rover receptor a su PC con el puerto USB etiquetado como POWER+GPS.
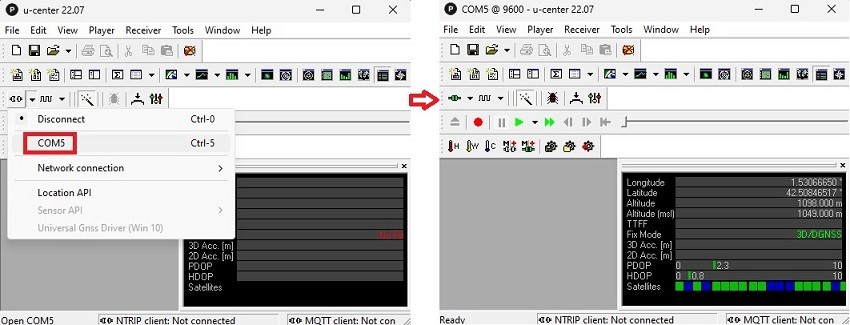
Abierto u-center. Conecte su receptor a u-center a través del puerto COM.
Descargue el archivo de configuración llamado "Rover enviando de vuelta su posición a la base" De nuestros Página de archivos de configuración. Súbelo a tu Rover. Asegúrese de descargar el archivo de configuración compatible con la versión de firmware de su receptor. Si no sabes cómo hacerlo, echa un vistazo a esto tutoriales.
En segundo lugar, ahora ve a tu Base.
Conecte las antenas GNSS tanto a su Base como a su Rover receptores. Coloque las antenas en un lugar con buena vista del cielo o cerca de una ventana para probar la funcionalidad.
Si conecta su Base a través del puerto USB etiquetado como POWER+GPS, verá la posición de la estación base como antes.
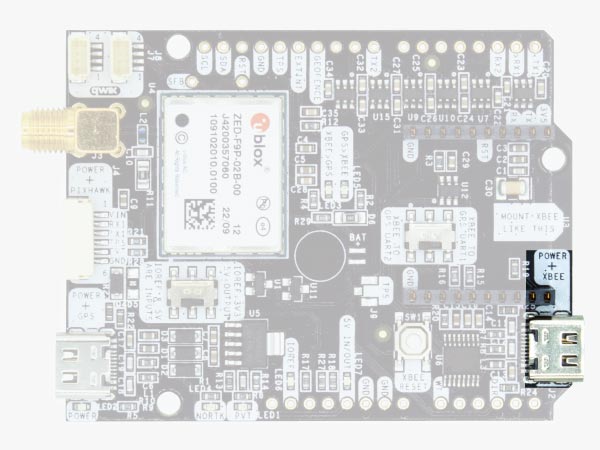
Conecte su receptor Base a través del puerto USB etiquetado como ENERGÍA+XBEE.
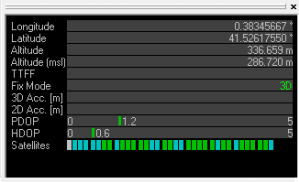
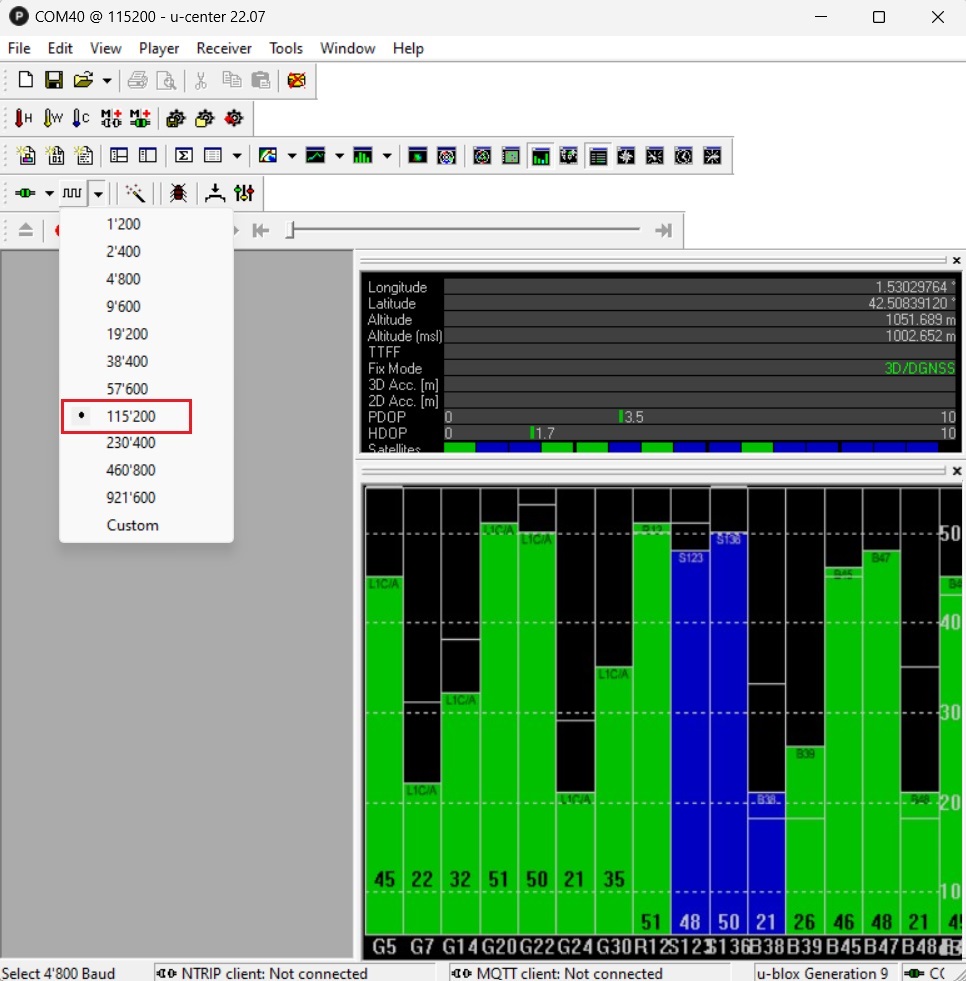
Conecte su receptor Base con u-center. Establecer velocidad en baudios 115'200. Verás la posición de tu rover.
Si tienes un proyecto Arduino, tendrás la RoverLa posición disponible en los pines TX2, RX2 de tu estación base de simpleRTK2B tableros de serie!
Notará que solo está disponible la información de posición y estado fijo, y no hay información sobre datos satelitales. Esto se debe a que el radio El enlace tiene un ancho de banda limitado y sólo podemos transmitir un mensaje desde la base a la rover. Seleccionamos el mensaje GGA, que ofrece un buen equilibrio entre longitud y contenido. Además es fácil de leer.
Nota importante: Esta configuración sólo funciona con Rover trabajando a 1Hz. Si desea aumentar el Rover velocidad de navegación, asegúrese de reducir la velocidad de detección GGA (UBX–>CFG–>MSG) con la misma cantidad, por lo que solo se envía una vez por segundo.
Ahora puedes rastrear la ubicación de tu Rover en tu Base en tiempo real!
Si quieres hacer este tutorial, tenemos todos los productos en stock y listos para ser enviados:
1. Nuestro equipo de ingeniería se pondrá en contacto contigo para resolver cualquier duda
2. Lo mantendremos informado sobre promociones y lanzamientos de nuevos productos.
3. Solo sabrá de nosotros cuando tengamos noticias importantes, no enviaremos spam a su correo electrónico.
 y
y  Comprar ahora
Comprar ahora