Conoce a nuestro equipo en San Diego, Estados Unidos, desde el martes 23 hasta el jueves 25 de abril en XPONENTIAL, stand 4700
Cómo hacer cinemática de posprocesamiento (PPK) con software gratuito RTKLIB
2024-02-08
Cinemática posprocesada (PPK) es una técnica de posicionamiento que implica el posprocesamiento de datos GNSS una vez completada la recopilación de datos.
PPK Las soluciones tienen varias ventajas:
No se requieren correcciones en tiempo real:
La rover El hardware es más simple, menos costoso, más liviano y de menor consumo, ya que el posprocesamiento no requiere un enlace de datos en tiempo real entre la base y el sistema. roverEsto puede resultar ventajoso en entornos remotos o desafiantes donde las correcciones en tiempo real pueden ser limitadas o no estar disponibles. RTK tiene un alcance limitado de 5 a 10 km, mientras que PPK no tiene tal limitación de alcance.
Resultados consistentes y repetibles:
PPK proporciona resultados consistentes y repetibles. Una vez que se recopilan los datos, se pueden procesar varias veces utilizando diferentes algoritmos o parámetros para optimizar la precisión de la solución de posición final.
En el tutorial anterior te hemos mostrado cómo generar archivos RINEX desde simpleRTK2B2B y simpleRTK3B. En este tutorial demostraremos cómo usar los archivos RINEX desde su base y rover para PPK.
Si no tienes tu propia estación base, no te preocupes. Puede descargar el archivo RINEX desde una estación base en línea en su área.
Puedes encontrar el servicio de corrección gratuito en tu zona. esta página.
Cómo hacer cinemática de posprocesamiento (PPK) con RTK¿LIB?
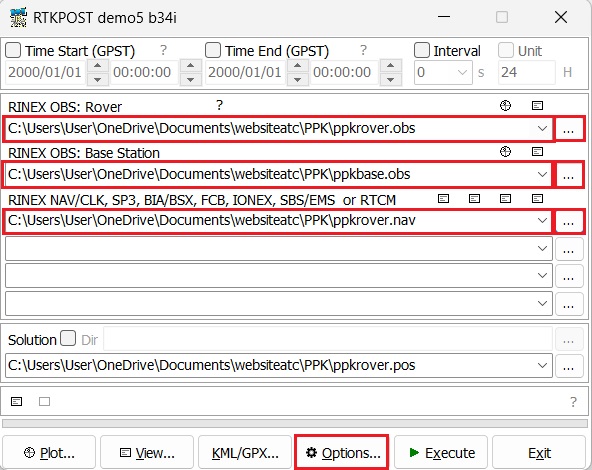
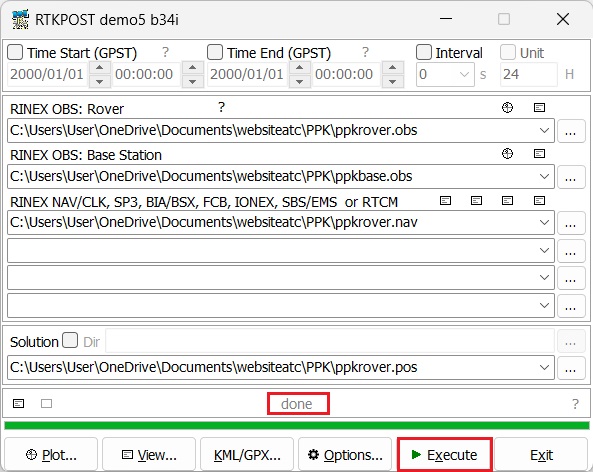
Abierto RTKPUBLICAR desde tu descarga RTKPaquete LIB. Haga clic en el ... botones en el lado derecho, seleccione el Rover el archivo de observación, el archivo de observación de la Base y el archivo de navegación. Haga clic en el Opciones ... del botón. Si no tiene su propia estación base, puede descargar un archivo RINEX desde el servicio de corrección en línea esta página.
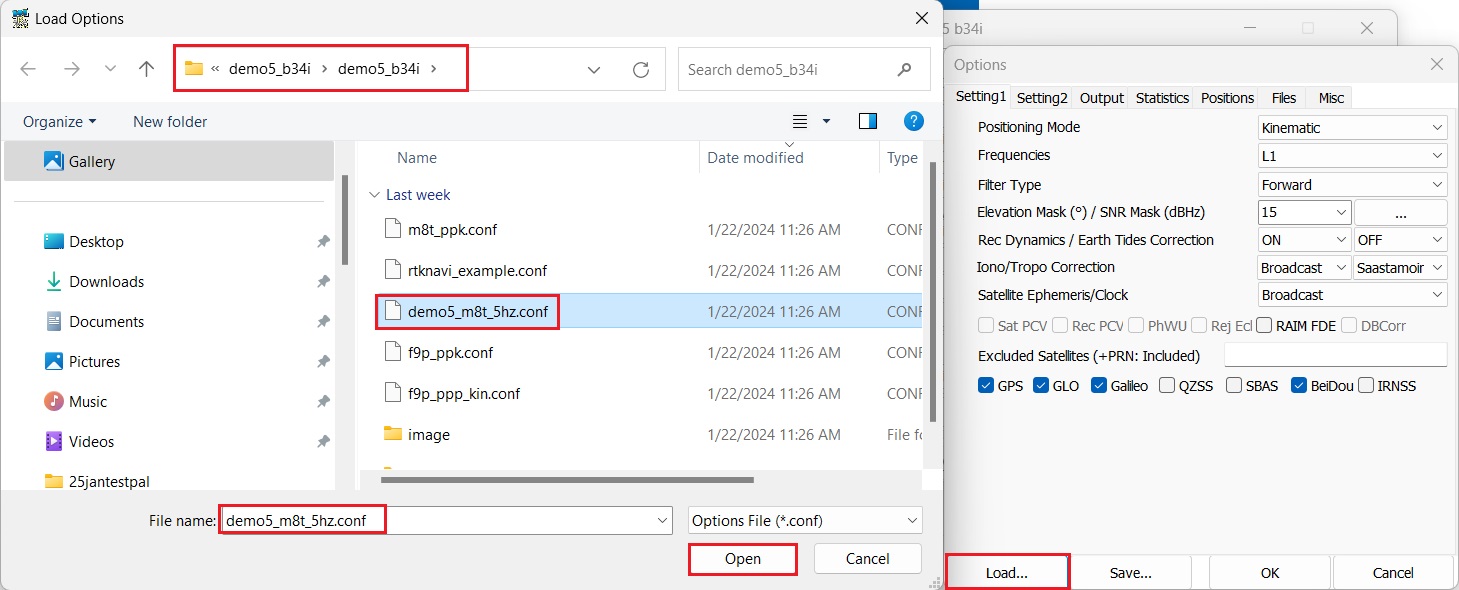
Haga clic en el Carga del botón.
Seleccione demostración5_m8t_5hz.conf archivo de la misma carpeta que la demo5 RTKejecutables LIB y luego haga clic en Abierto.
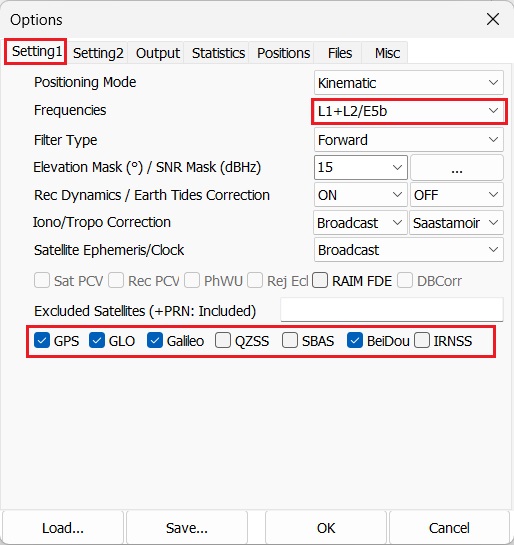
At Ajuste1 pestaña, elegir L1+L2/E5b at Frecuencias. Habilite los satélites aplicables en su región geográfica.
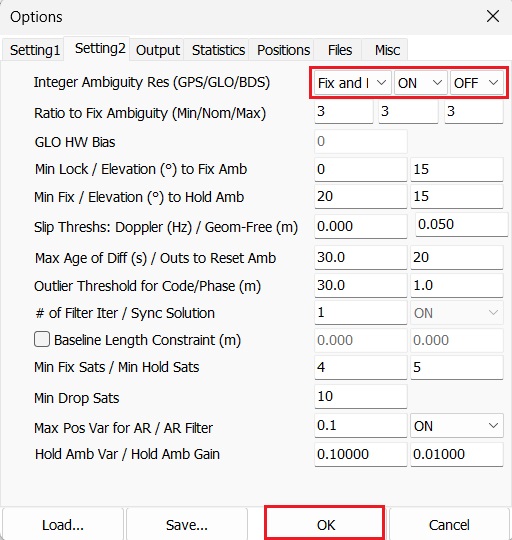
Desde la pestaña "Configuración2", configure Resolución de ambigüedad de enterosGPS a Reparar y mantener, GLO a ON, BDS a OFF.
Si no está utilizando un F9P receptor para la base, luego deje este campo configurado en "Fix-and-Hold", lo que calibrará automáticamente los sesgos. Hacer clic OK para cerrar el menú Opciones.
Haga Clic en Implementación para ejecutar la solución. La barra en la parte inferior de la GUI mostrará el estado de la solución mientras se ejecuta e informará cualquier error. Debería ver una combinación de Q=1 y Q=2 mientras se ejecuta la solución. Ya verás hecho cuando termine.
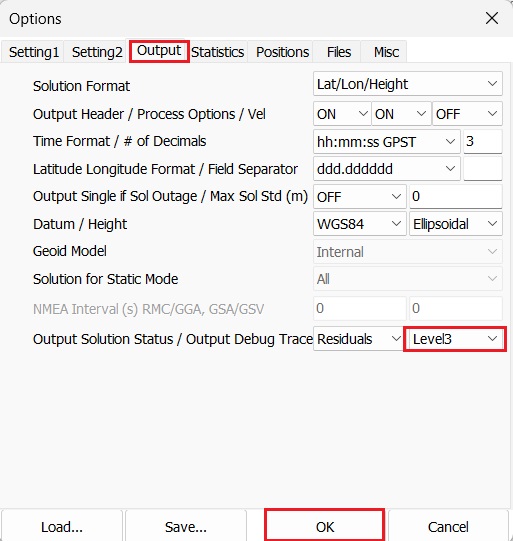
Si solo ve Q=0, algo anda mal. En este caso, abra el Opciones ventana, seleccione la Salida y establezca "Seguimiento de depuración de salida" en "Nivel 3", salga del menú Opciones y vuelva a ejecutar la solución. Luego abre el **.rastro archivo en la carpeta de soluciones para obtener información adicional sobre lo que salió mal.
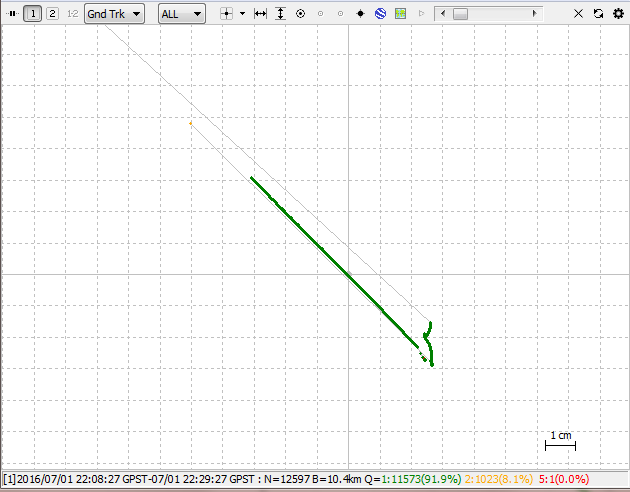
Haga clic en Parcela para trazar la solución con RTKTRAMA.
Q = 1 solución significa Solución: la precisión es de nivel centimétrico.
Q = 2 significa flotar: la precisión es de nivel submétrico
Q = 5 La solución significa Single, que generalmente es el nivel del medidor.
Ahora puedes realizar PPK para tu proyecto! Este método le permite lograr un posicionamiento GNSS de alta precisión sin necesidad de correcciones en tiempo real, simplificando así los requisitos de hardware.
Si necesita el RTK kit de inicio, que incluye ambos Rover y base para PPK, tenemos todos los productos necesarios en stock y listos para su envío:
1. Nuestro equipo de ingeniería se pondrá en contacto contigo para resolver cualquier duda
2. Lo mantendremos informado sobre promociones y lanzamientos de nuevos productos.
3. Solo sabrá de nosotros cuando tengamos noticias importantes, no enviaremos spam a su correo electrónico.
 y
y  Comprar ahora
Comprar ahora