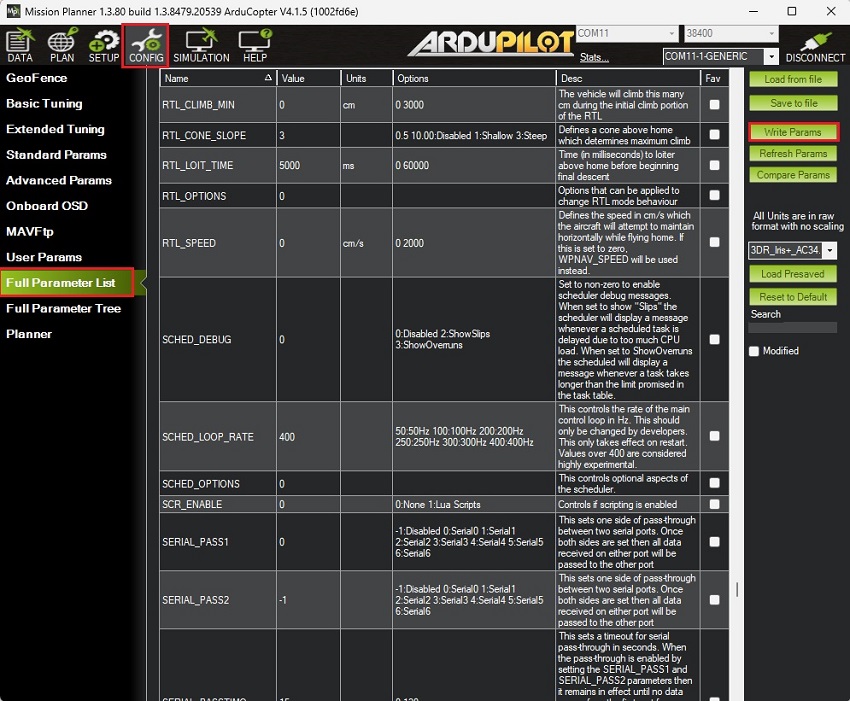
- Ve a CONFIG->Lista completa de parámetros.
Dado que las versiones de firmware pueden diferir de la suya, a continuación se muestra una lista de todos los parámetros que se han modificado en comparación con la configuración predeterminada:
COMPÁS_ENABLE,0
COMPÁS_USO,0
COMPÁS_USE2,0
COMPÁS_USE3,0
EK3_MAG_CAL,5
EK3_SRC1_YAW,2
GPS_AUTO_CONFIG,0
GPS_AUTO_SWITCH,0
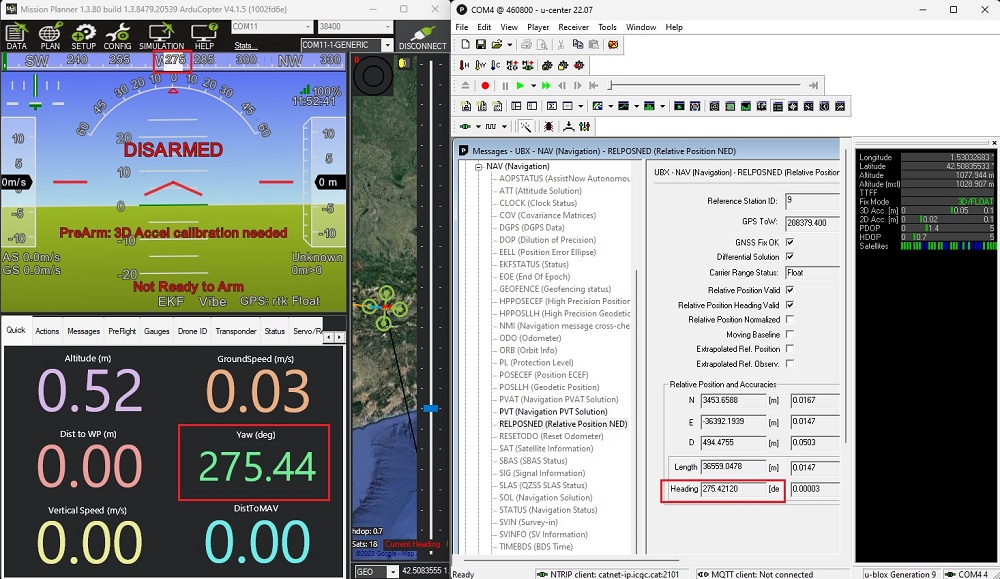
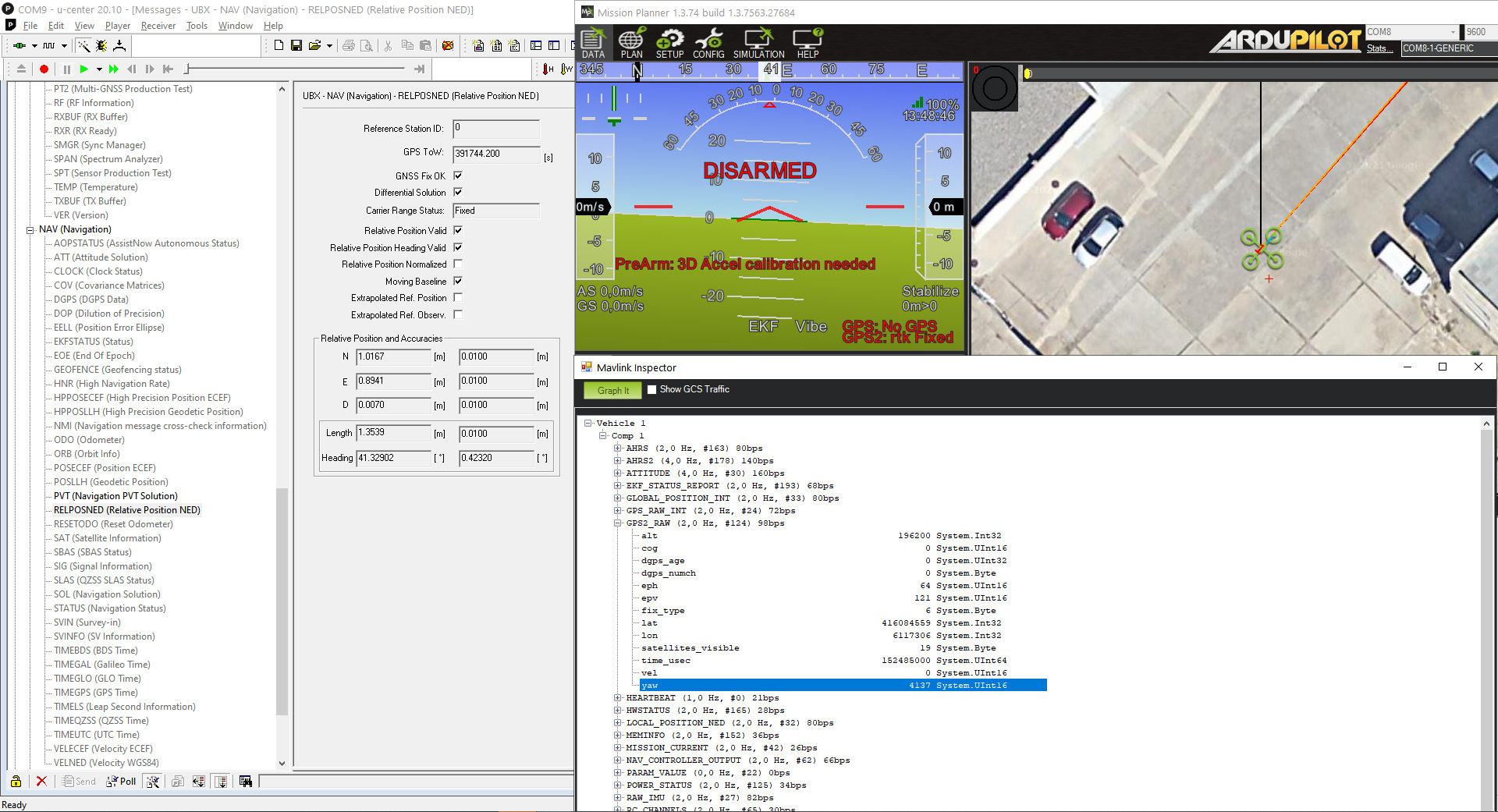
GPS_POS1_X,-1.25 *Este valor debe contener la distancia en metros entre antenas. Cambie el signo si el rumbo tiene un desplazamiento de 180 grados (o intercambie los conectores SMA en simpleRTK2B2B+título).
GPS_PRIMARIO, 1
GPS_RATE_MS, 100
GPS_RATE_MS2, 100
TIPO_GPS, 0
GPS_TYPE2,18
SERIE1_BAUDIOS, 115
SERIE1_OPCIONES,0
SERIE1_PROTOCOLO,5
Prensa Escribir parámetros para guardar su configuración
 y
y  Comprar ahora
Comprar ahora