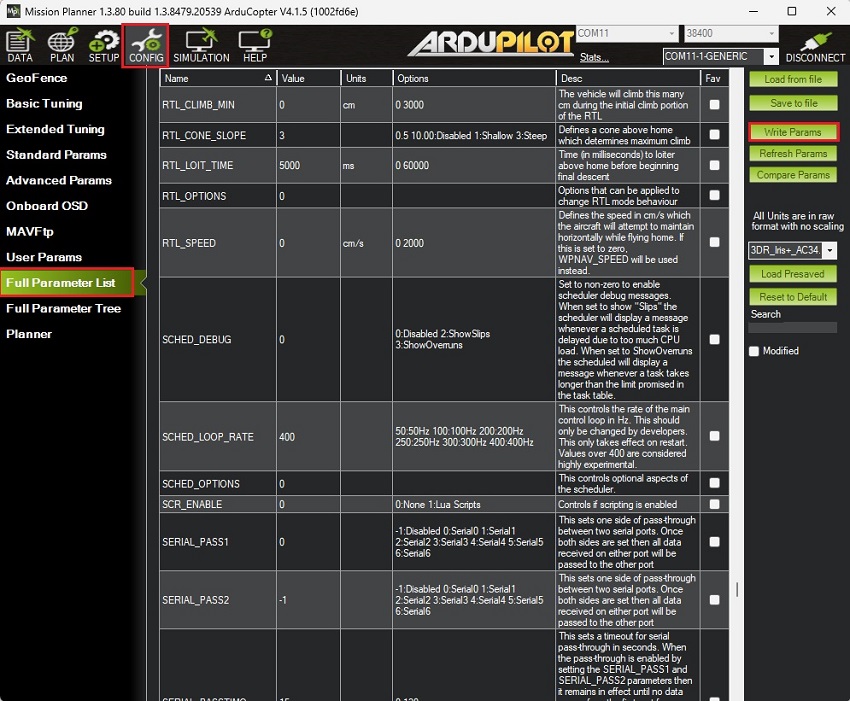
Ve a CONFIGURAR–>Lista completa de parámetros.
Dado que las versiones de firmware pueden ser diferentes a la tuya, aquí tienes una lista de todos los parámetros modificados respecto a la configuración por defecto:
COMPÁS_ENABLE,0
COMPÁS_USO,0
COMPÁS_USE2,0
COMPÁS_USE3,0
EK3_MAG_CAL,5
EK3_SRC1_YAW,2
GPS_AUTO_CONFIG,0
GPS_AUTO_SWITCH,0
GPS_RATE_MS, 100
TIPO_GPS, 16
SERIE1_BAUDIOS, 115
SERIE1_PROTOCOLO,5
Prensa Escribir parámetros para guardar su configuración
 y
y  Comprar ahora
Comprar ahora