y
y 



Mission Planner
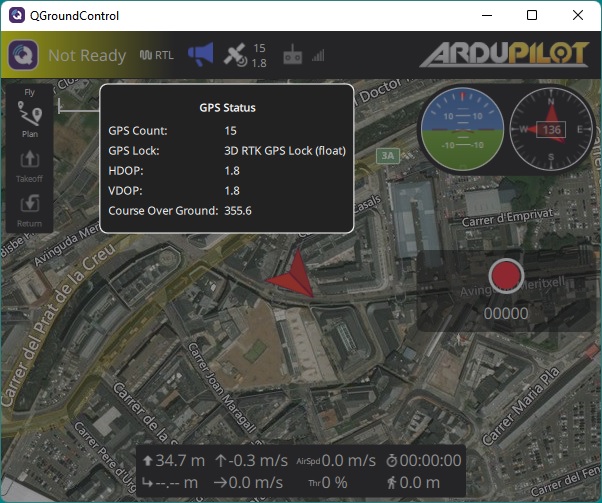
QGroundControl
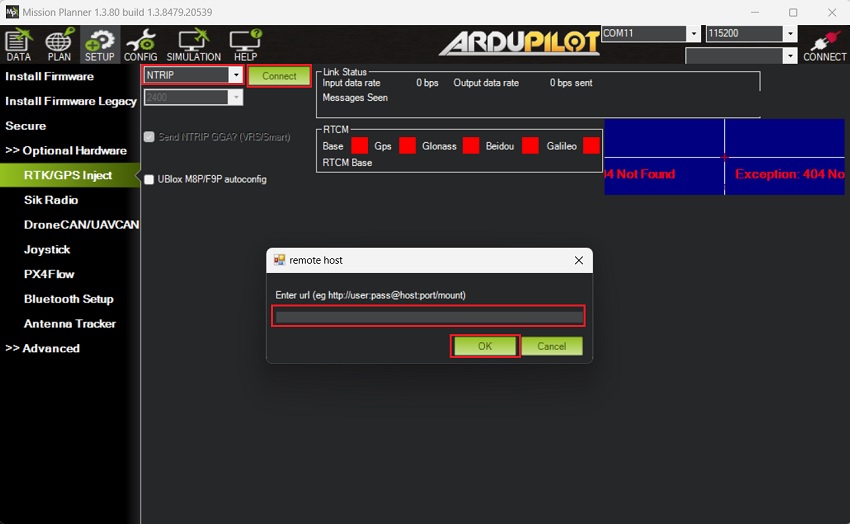
Mission Planner
- Abra MissionPlanner. Conecte su AutoPilot a través del puerto COM.
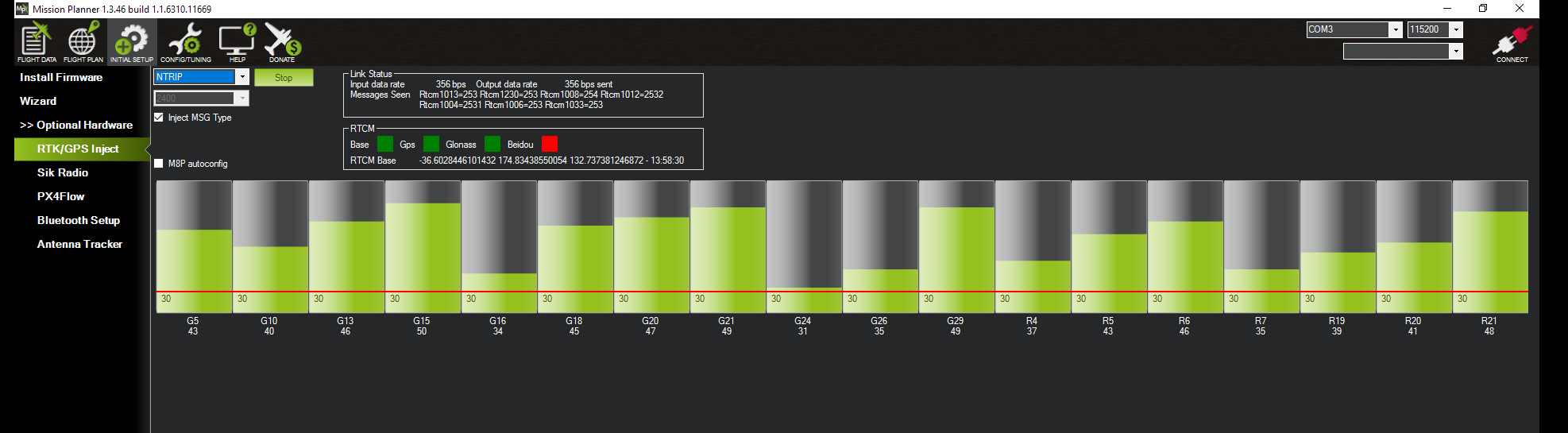
- Ve a CONFIGURACIÓN–>Hardware opcional–>RTK/Inyección GPS.
- Seleccione NTRIP en el cuadro desplegable y presione Conectar. Aparecerá una ventana emergente, ingrese su NTRIP caster credenciales en este formato: usuario:contraseña@host:puerto/punto de montaje.

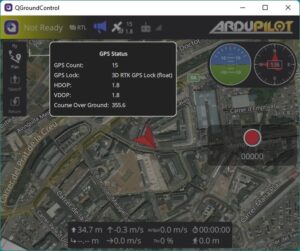
- If everything is correct, you will see a summary of GPS signal status and generated RTCM messages as well as the position of your GNSS base station on the map.
- Su receptor GNSS conectado al piloto automático recibirá correcciones RTCM y entrará en modo fijo/flotante. RTK modo.
QGroundControl
- Abra QGroundControl. Ejecute MAVProxy.
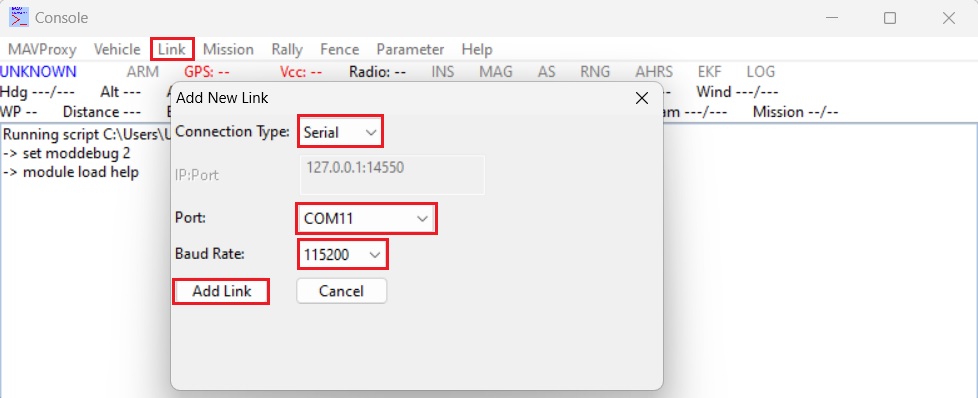
- En MAVProxy vaya a Enlace–>Agregar–>Serie–>Seleccione el enlace de telemetría o el puerto COM del piloto automático y la velocidad en baudios (normalmente la velocidad de datos de la conexión USB es 115200 y la radio la tasa de conexión es 57600). Prensa Añadir enlace.

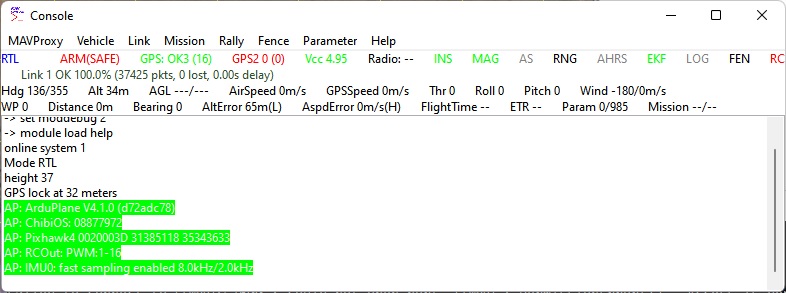
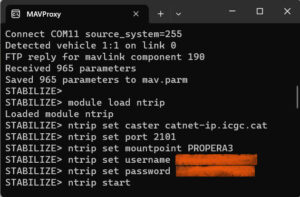
- Si la conexión es correcta, su pantalla MAVProxy debería verse similar a esta:

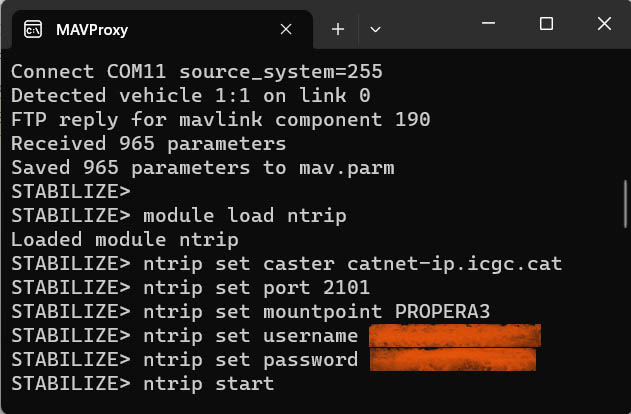
- En la ventana del terminal MAVProxy escriba (reemplace XXXXX por su NTRIP caster cartas credenciales):
ntrip de carga del módulo
conjunto ntrip caster XXXXX
puerto de configuración ntrip XXXXX
punto de montaje establecido por ntrip XXXXX
ntrip establece nombre de usuario XXXXX
ntrip establecer contraseña XXXXX
inicio de viaje
- El receptor GNSS, cuando esté conectado a su piloto automático, recibirá automáticamente mensajes RTCM de su NTRIP. caster y transición a RTK fix/modo flotante.