y
y 



Con Mission Planner El proceso es extremadamente fácil, las instrucciones son las mismas para simpleRTK2B2B, simpleRTK2B2Blite (u-blox) ZED-F9P) y simpleRTK3B (Septentrio Mosaic X5) receptores.
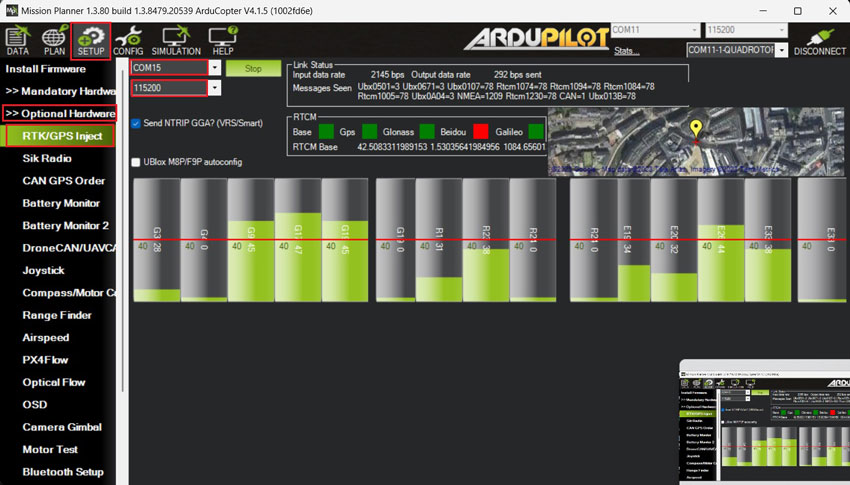
- Abierto Mission Planner y conéctese a su piloto automático como de costumbre a través del puerto COM.
- Ve a CONFIGURACIÓN->Hardware opcional->RTK/Inyección GPS.
- Seleccione el puerto COM al que está conectada su estación base GNSS y configure la velocidad en baudios adecuada. Prensa CONTACTO.
- Ahora puedes conectar tu kit de rumbo a tu piloto automático siguiendo el tutorial Como conectar simpleRTK2B2B Dirigiéndose a ArduPilot con externo RTK correcciones?
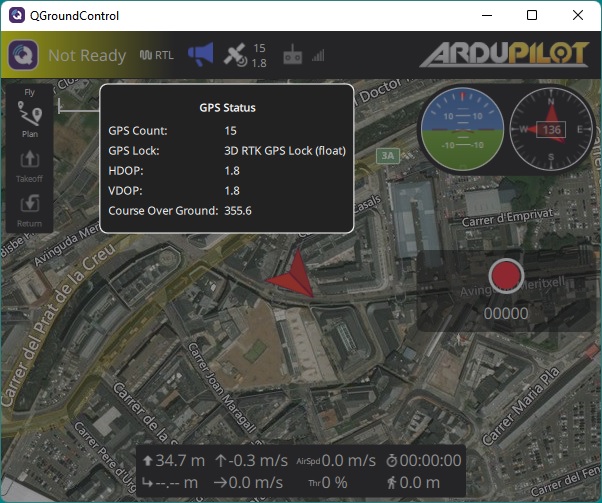
Luego regrese a la pantalla principal de Mission Planner. Aquí verá tanto la posición de la estación base como la posición de su Ardupilot GNSS.

QGroundControl detecta automáticamente tanto el simpleRTK2B2B y simpleRTK3B tableros (no simpleRTK2B2Blite), conectado vía USB al mismo ordenador en el que se ejecuta QGroundControl.
Configura automáticamente el receptor y comienza a transmitir las correcciones al receptor GNSS montado en el piloto automático.
Hemos probado la configuración automática y el comportamiento no siempre es el esperado, por lo que en este tutorial mostraremos un método alternativo que también soporta simpleRTK2BReceptores 2Blite como estaciones base y funcionan el 100% del tiempo.
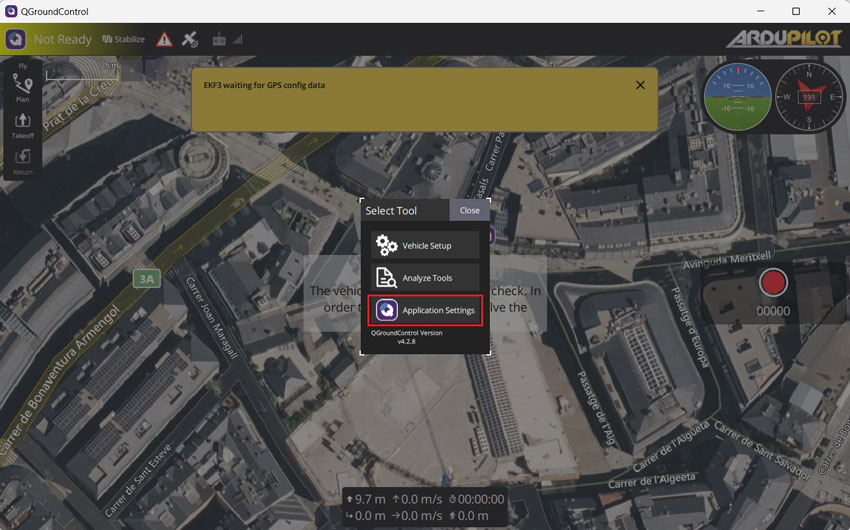
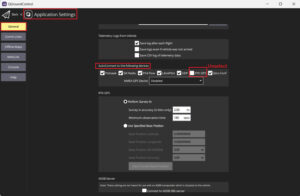
- Abra QGroundControl y presione Configuraciones de la aplicación En el menú principal.
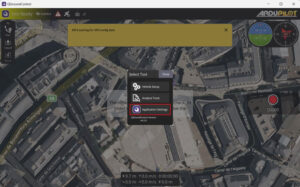
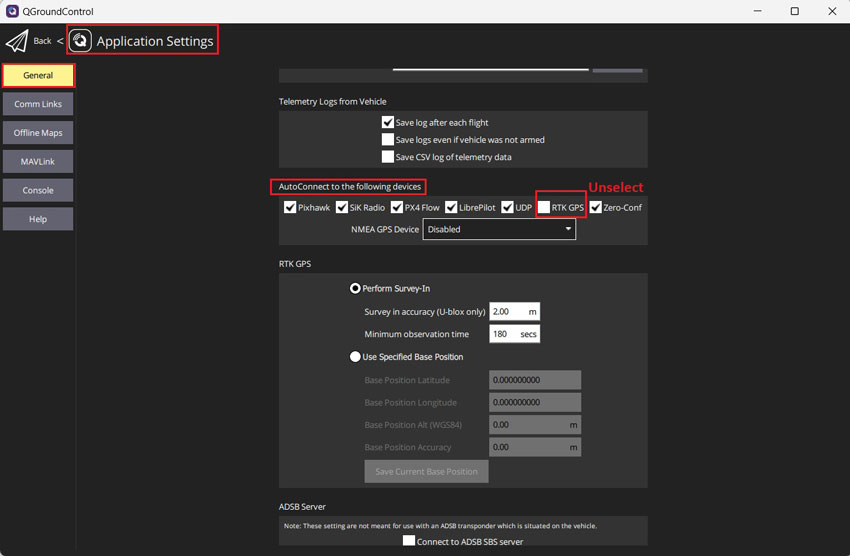
- Ve a General->Conexión automática a los siguientes dispositivos->Deseleccionar RTK GPS.
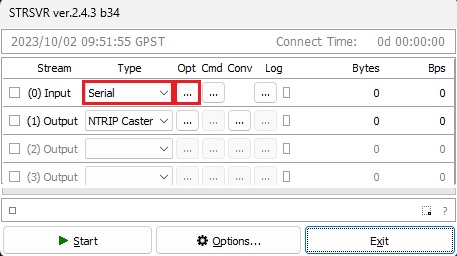
- Ejecute la aplicación STRSVR. Seleccionar (0) Entrada as Serial puerto, haga clic Optar… del botón.
- Set Puerto al puerto COM de su estación base receptora GNSS.
Set Velocidad de bits (bps) a la velocidad en baudios de su receptor GNSS, haga clic en OK.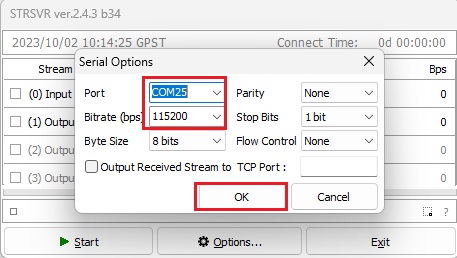
- Seleccione (1) Salida as NTRIP Caster, haga clic Optar… del botón.
- Set Puerto, Por ejemplo 2101.
Set Punto de montaje, Por ejemplo PROBAR.
Puede dejar ID de usuario y Contraseña vacíos, haga clic en OK.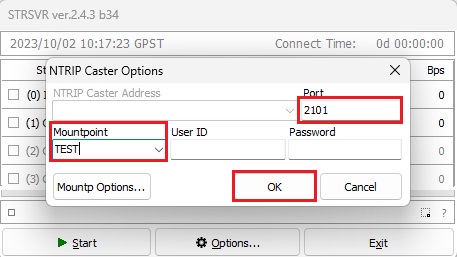
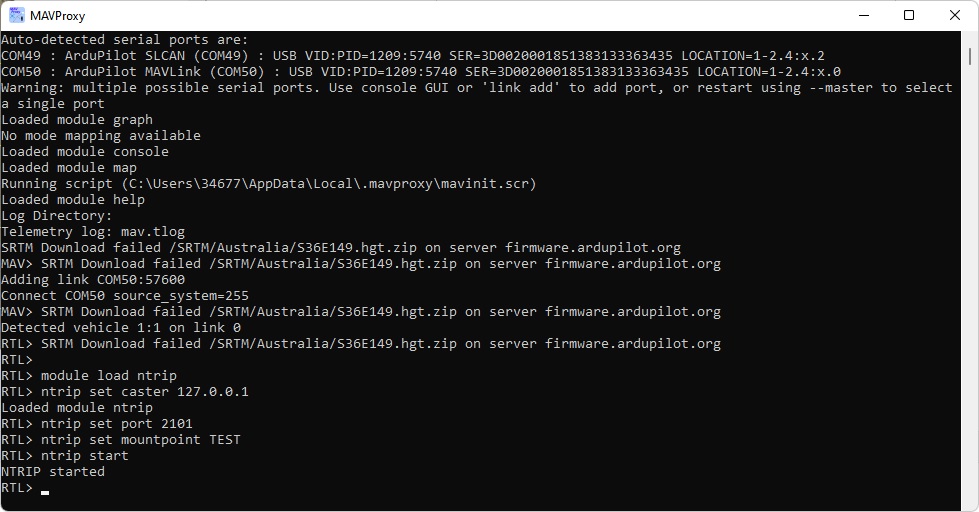
- Ejecute MAVProxy.
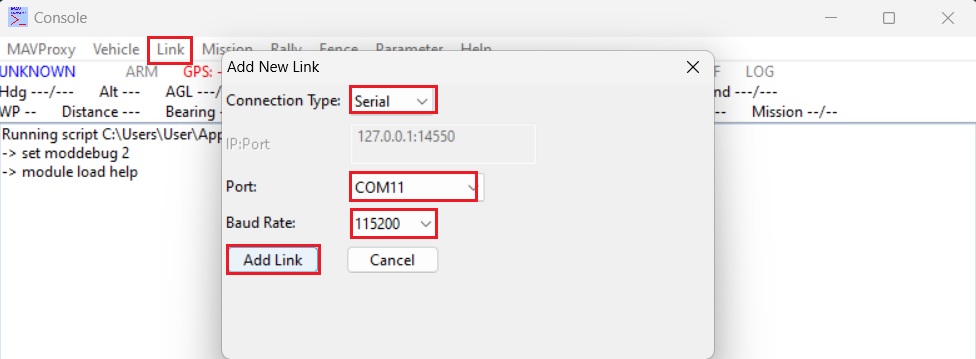
Ve a Enlace–>Agregar–>Serie–>Seleccione el enlace de telemetría o piloto automático Puerto COM y establecer Velocidad de transmisión. Hacer clic Añadir enlace.
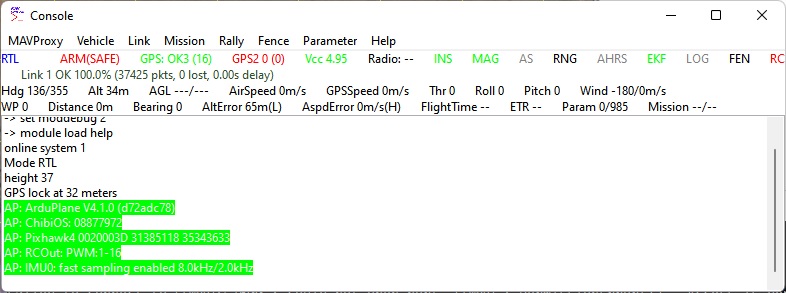
- Si la conexión es correcta, su pantalla MAVProxy debería verse similar a esta.

- Abra la ventana del terminal MAVProxy. Tipo:
ntrip de carga del módulo
conjunto ntrip caster 127.0.0.1
ntrip establecer puerto 2101
PRUEBA del punto de montaje del conjunto ntrip
inicio de viaje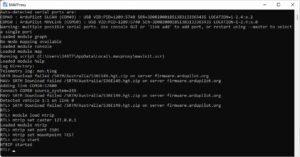
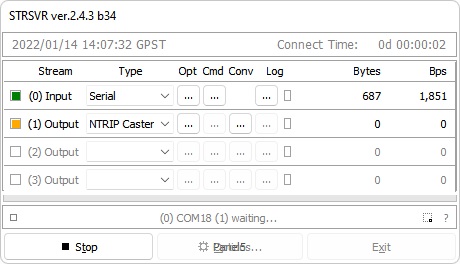
- Una vez completado el paso anterior, STRSVR debería verse similar al ejemplo siguiente, lo que indica que la transmisión de datos está en progreso.
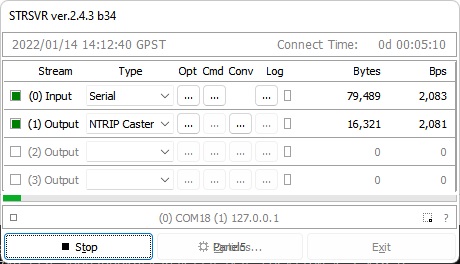
- El receptor GNSS conectado a su piloto automático recibirá mensajes RTCM desde su estación base automáticamente e ingresará RTK fix/modo flotante.