 y
y 
La precisión de un receptor GNSS depende de muchos factores, por ejemplo, la antena utilizada, la dinámica del vehículo, la vista del cielo,...
Entonces, cada vez que vea una cifra de precisión, debe preguntar en qué condiciones se ha medido.
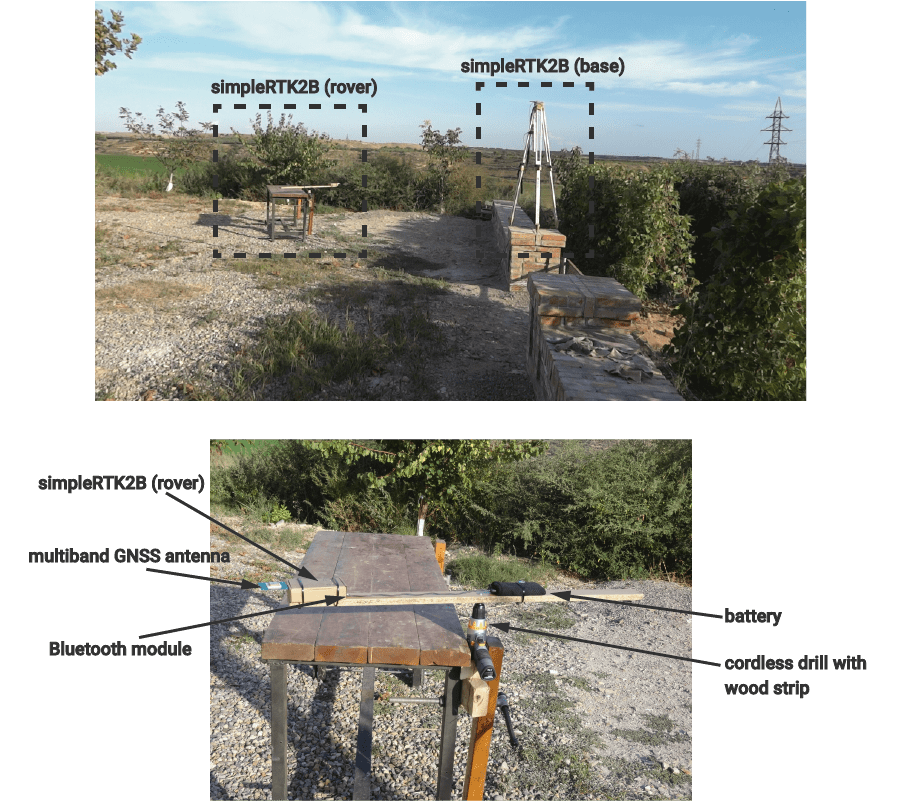
En esta prueba, queríamos centrarnos en la precisión y la repetibilidad, por lo que preparamos un banco de pruebas especial:
Condiciónes de la prueba:
- Base y rover simpleRTK2BLas placas 2B son prototipos
- Antena pasiva GNSS multibanda para base y rover.
Las antenas finales (tanto OEM como IP65) estarán activas, con mejor recepción de señal. - Taladro girando en una posición de disparo fija, con una velocidad ~38rpm
- Distancia (radio) de la antena GNSS al centro de perforación de 60.96 cm
- Velocidad de la antena GNSS de ~2.3 m/s
- simpleRTK2B2B trabajando en la baserover configuración (RTK)
- simpleRTK2B2B configurado para reportar datos a 5Hz
- 41.7 minutos de datos (12510 puntos), incluyendo inicio y parada del simulacro.
Si alguien tiene curiosidad, se puede descargar el registro completo de la prueba esta página. - Todos los resultados mostrados no tienen procesamiento posterior/filtrado.
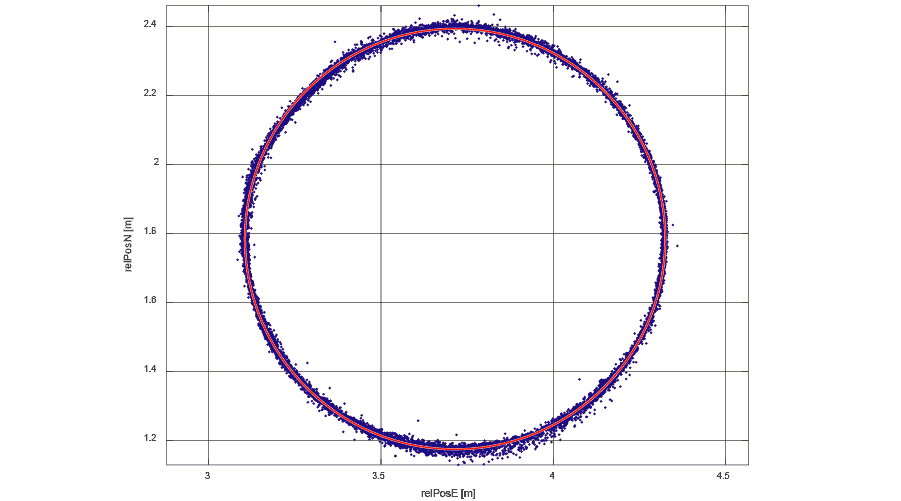
Resultados de la prueba, que muestran la posición relativa en la base (azul) y la posición real (roja):
Para cada uno de los 12510 puntos se ha calculado el error con respecto a la posición real y este es su histograma PDF y CDF, ajustado con una distribución de Weibull:
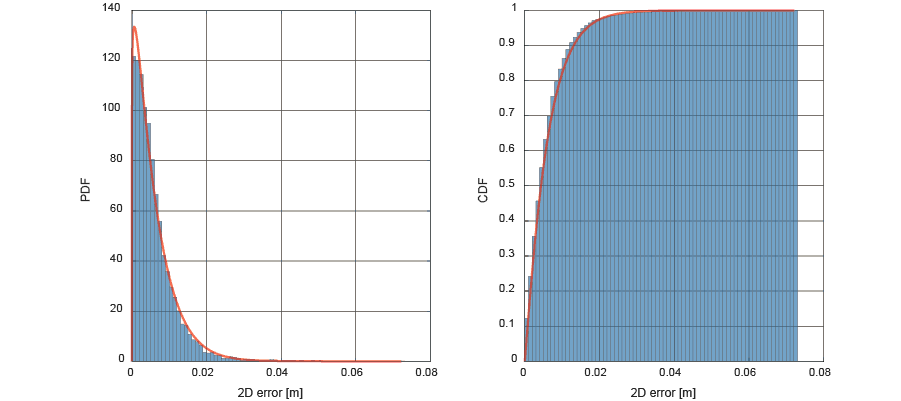
La precisión es:
- <7 mm (~1σ, el 68 % de los puntos tienen una precisión superior a 7 mm)
- <1.7 cm (~2σ, el 95.45 % de los puntos tienen una precisión superior a 1.7 cm)
- <3.8 cm (~3σ, el 99.73 % de los puntos tienen una precisión superior a 3.8 cm)
