Los robots terrestres se conocen con muchos términos, como robots móviles autónomos (AMR), sistemas terrestres no tripulados (UGS), robots terrestres no tripulados (UGR), vehículos terrestres no tripulados (UGV), drones terrestres, plataformas robóticas móviles.
El elemento clave que une estos términos es que todos se refieren a robots terrestres que son capaces de moverse y operar de forma autónoma sin intervención humana. Están equipados con tecnologías avanzadas, la principal de las cuales es RTK la tecnología que les permiten navegar en el entorno con precisión centimétrica y realizar diversas tareas.
ArduSimple permite soluciones de posicionamiento de alta precisión a escala de mercado masivo, incluso en segmentos donde tales soluciones se consideraban poco prácticas anteriormente.
Robot agricola
Uso de robots agrícolas o ganaderos RTK la tecnología para realizar diversas tareas en la agricultura y equipado con sensores, un RTK receptor y antena, lo que les permite realizar tareas de forma más eficiente. Mira asequible RTK Kits de iniciación en ArduSimple. Si quieres saber más, hemos preparado la reseña de RTK casos de uso en agricultura de precisión.
Plantador
Los sistemas de automatización de plantación se utilizan para plantar semillas y árboles en hileras rectas con alta precisión, mejorando el rendimiento de los cultivos y reduciendo el desperdicio.
Harvester
Los robots de cosecha están diseñados para cosechar cultivos como frutas, verduras y granos con precisión y velocidad y reducen la necesidad de mano de obra.
Monitoreo
Los robots de monitoreo de campo usan sensores y cámaras para monitorear la salud de los cultivos y detectar cualquier problema, como infestaciones de plagas o enfermedades.
Pulverizador
Los rociadores autónomos brindan una aplicación uniforme y precisa de los rociados, lo que reduce el error humano y garantiza una cobertura uniforme, y aumenta la eficiencia a través de operaciones precisas, lo que ahorra costos de tiempo.
weeder
Los robots de deshierbe identifican y eliminan las malas hierbas sin necesidad de herbicidas, lo que reduce el uso de productos químicos nocivos en la agricultura.
Fertilizantes
Las plataformas de fertilización autónomas aplican fertilizantes y otros nutrientes a los cultivos, mejorando la calidad del suelo.
Limpiador autónomo
Si desea desarrollar un limpiador autónomo o un quitanieves para quitar la nieve de una carretera, o una barredora de calles, o un robot de basura para la recogida y eliminación de residuos, RTK la tecnología permite a estos robots crear un mapa preciso del espacio del piso y luego navegarlo con precisión, evitando obstáculos y limpiando en línea recta.
El uso de RTK hizo posible automatizar la limpieza de paneles solares de la contaminación de la superficie.
robot de construccion
Robots terrestres de construcción con RTK se utilizan para surveying y preparación del sitio para crear mapas precisos que brinden una vista clara y precisa de la topografía, los contornos y las características del sitio, midiendo distancias, ángulos y elevaciones, para preparar el suelo para la construcción, como clasificación y nivelación del terreno, o incluso para aplicar marcas de construcción a alta velocidad y con gran precisión.
Los sistemas terrestres no tripulados son la solución ideal para tareas repetitivas, laboriosas y laboriosas en las industrias de infraestructura, carreteras y construcción.
Robot de reparto
Los robots de reparto autónomos se suelen utilizar para entregar paquetes y mercancías en la “última milla”, lo que reduce la necesidad de intervención humana. Para posicionamiento, navegación y evitación de obstáculos de alta precisión, se necesitan robots para exteriores. RTK. Complementos PointPerfect RTK tecnología para simplificar la implementación. PointPerfect permite utilizar soluciones de posicionamiento de alta precisión para el mercado masivo de robots de reparto. Si es nuevo en PointPerfect, obtenga información sobre el potencial de RTK-Tecnología SSR.
vehículo de extinción de incendios
El vehículo robótico de extinción de incendios es capaz de hacer fluir el agua y se opera de forma remota con un controlador que proporciona retroalimentación de video de alta definición para una máxima maniobrabilidad en condiciones difíciles. Datos de posición precisos proporcionados por RTK la tecnología permite operar en entornos desafiantes.
Los bomberos también están utilizando drones, dado el rápido aumento del tráfico, la altura de los edificios residenciales y comerciales, los procesos de urbanización y la multitud de sustancias peligrosas utilizadas en la construcción. Si quieres conoce más sobre los drones, hemos preparado más casos de uso de los mismos.
Robot de inspeccion
Los robots de inspección se utilizan para inspeccionar edificios, turbinas eólicas y estructuras en busca de defectos, grietas, corrosión, fugas u otros problemas para identificar problemas potenciales y proporcionar un análisis detallado de la condición de la estructura. Los robots de inspección también se utilizan para recopilar datos de espacios habitables, radiados o contaminados químicamente.
Las inspecciones robóticas de las turbinas eólicas brindan una vista detallada de los daños y ayudan a identificar cualquier problema que deba abordarse o identificar problemas con las palas, los cojinetes u otros componentes de la turbina.
Cortacésped
Cortacéspedes equipados con RTK navegue y corte el césped con mayor eficiencia y precisión. Los robots de jardinería se pueden utilizar tanto en áreas más grandes, como parques y campos de golf, como en el patio trasero. Compartimos con vosotros un proyecto interesante, especialmente útil para paisajistas comerciales y cualquiera de nosotros que tenemos césped: un piloto automático del mercado de accesorios para cortacéspedes comerciales.
El césped de bricolaje se puede hacer desde cero utilizando varios materiales y componentes. Construir una cortadora de césped de bricolaje puede ser un proyecto divertido y gratificante para quienes disfrutan trabajar con las manos. Para aquellos, preparamos un tutorial de cómo usar ArduSimple con RO y Ardupiloto para ayudar a los entusiastas del bricolaje a desarrollar una cortadora de césped de una manera fácil. Te invitamos a revisar el proyecto del cliente que le permitirá construir su propia cortadora de césped.
robot de marcado
Los robots autónomos de creación de líneas están diseñados para pintar con precisión líneas de campo en estadios, parques y clubes deportivos aplicando pintura al césped a través de una boquilla. con el incorporado RTK kit de inicio En los robots de marcado, puedes olvidarte de las cuerdas y el teorema de Pitágoras para determinar el tamaño correcto del campo o caminar decenas de horas cada semana empujando el marcador de línea. simpleRTK2BKit básico de inicio 2B permite que el robot se mueva de forma autónoma con una precisión centimétrica. Aprender más acerca de simpleRTK2BIntegración 2B con ROS.
Robot de seguridad
Los robots de seguridad se utilizan para patrullar, monitorear grandes áreas, alimentar y alertar al personal de seguridad en caso de cualquier actividad sospechosa, otorgar o denegar el acceso al personal autorizado e inspeccionar áreas de difícil o peligroso acceso para los humanos. Equipado con sensores, el RTK El robot puede mapear cada detalle del terreno y encontrar la ruta más rápida para realizar su misión.
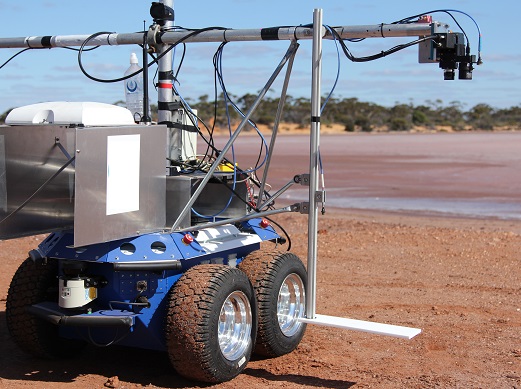
Surveyrobot volador
El propósito de un surveying robot es para agilizar una serie de trabajos en los sitios, tales como surveying y registro de datos de coordenadas y lograr ahorro de mano de obra y alta eficiencia en surveytrabajo. Se eliminan los errores causados por el hombre al leer y escribir datos de coordenadas, y los datos de coordenadas se pueden preparar de manera eficiente en la oficina del sitio. Autónomo surveyel sistema de control empodera surveying profesionales para el diseño con mayor precisión y velocidad en comparación con los métodos convencionales.
1. Nuestro equipo de ingeniería se pondrá en contacto contigo para resolver cualquier duda
2. Lo mantendremos informado sobre promociones y lanzamientos de nuevos productos.
3. Solo sabrá de nosotros cuando tengamos noticias importantes, no enviaremos spam a su correo electrónico.















 y
y  Comprar ahora
Comprar ahora